Home
Publications
Talks
Blog
Resume
Photos
Light
Dark
Automatic
1
OctoSense: Self-Supervised Learning for Multimodal Robot Perception
Anthony Bisulco
,
Jeremy Wang
,
Kostas Daniilidis
,
Randall Balestriero
,
Pratik Chaudhari
Cite
Paper
Project
Dataset
Code
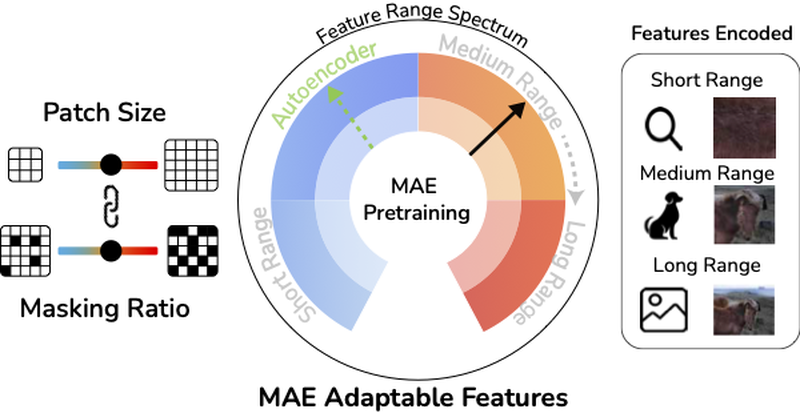
From Linearity to Non-Linearity: How Masked Autoencoders Capture Spatial Correlations
Anthony Bisulco
,
Rahul Ramesh*
,
Randall Balestriero
,
Pratik Chaudhari
Cite
Paper
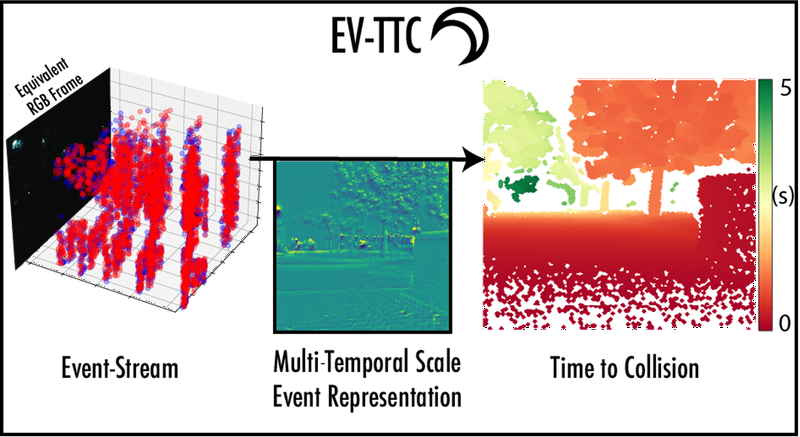
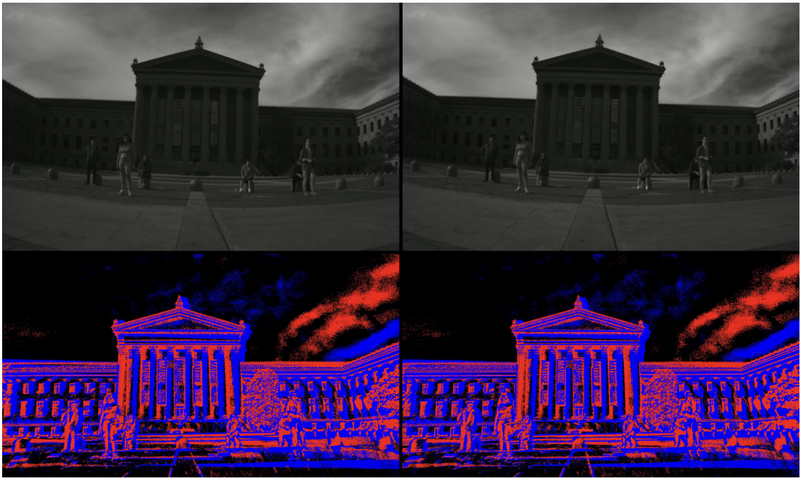
EV-TTC: Event-Based Time to Collision Under Low Light Conditions
Anthony Bisulco
,
Vijay Kumar
,
Kostas Daniilidis
Cite
Paper
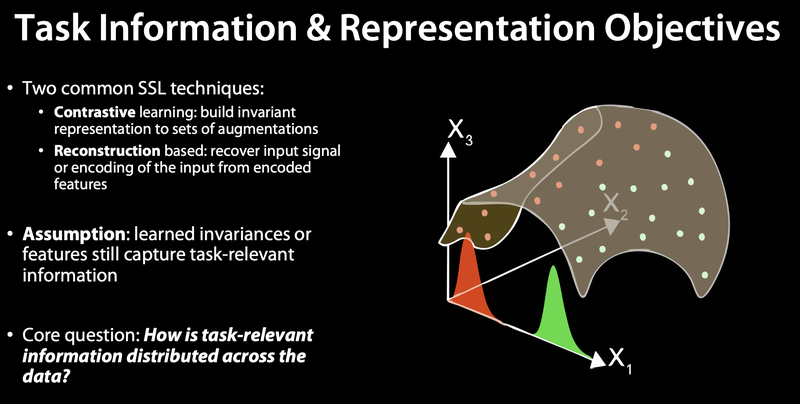
Many Perception Tasks are Highly Redundant Functions of their Input Data
Rahul Ramesh*
,
Anthony Bisulco
,
Ronald W. DiTullio
,
Linran Wei
,
Vijay Balasubramanian
,
Kostas Daniilidis
,
Pratik Chaudhari
Cite
Paper
M3ED: Multi-Robot, Multi-Sensor, Multi-Environment Event Dataset
Kenneth Chaney
,
Fernando Cladera Ojeda
,
Ziyun Wang
,
Anthony Bisulco
,
Christopher Korpela
,
Vijay Kumar
,
Camillo J Taylor
,
Kostas Daniilidis
Cite
Paper
Project
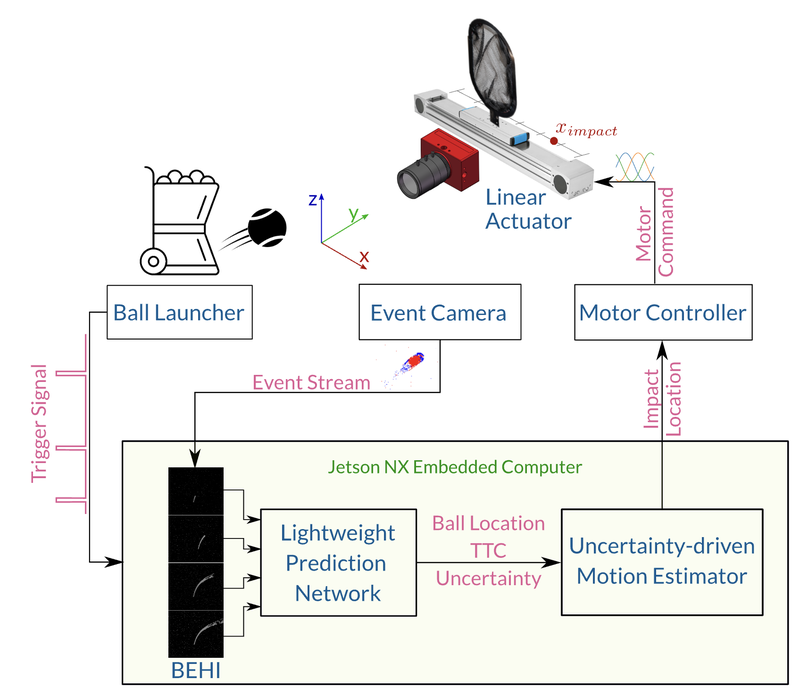
EV-Catcher: High-Speed Object Catching Using Low-latency Event-based Neural Networks
Ziyun Wang
,
Fernando Cladera Ojeda
,
Anthony Bisulco
,
Daewon Lee
,
Camillo J Taylor
,
Kostas Daniilidis
,
M Ani Hsieh
,
Daniel D Lee
,
Volkan Isler
Cite
Paper
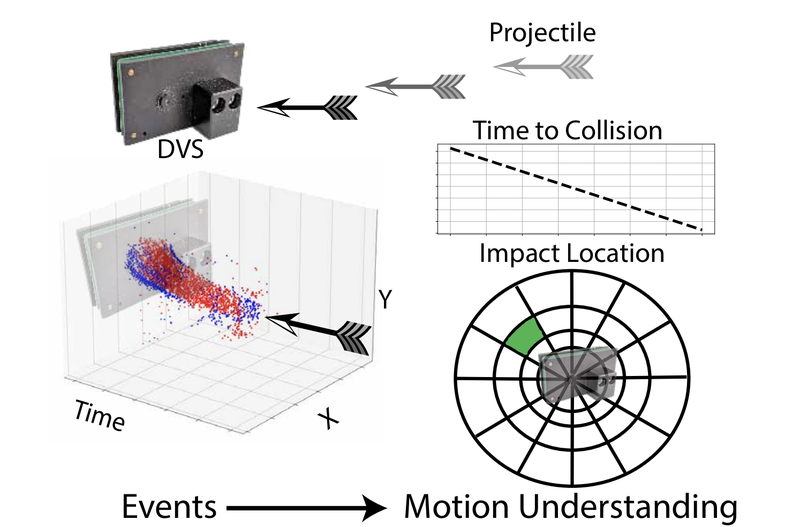
Fast Motion Understanding with Spatiotemporal Neural Networks and Dynamic Vision Sensors
Anthony Bisulco
,
Fernando Cladera Ojeda
,
Volkan Isler
,
Daniel D Lee
Cite
Paper
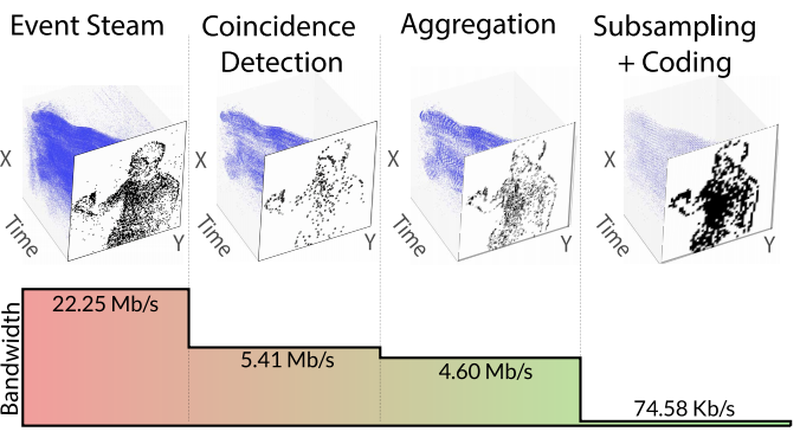
Near-chip Dynamic Vision Filtering for Low-Bandwidth Pedestrian Detection
Anthony Bisulco
,
Fernando Cladera Ojeda
,
Volkan Isler
,
Daniel Dongyuel Lee
Cite
Paper
On-device event filtering with binary neural networks for pedestrian detection using neuromorphic vision sensors
Fernando Cladera Ojeda
,
Anthony Bisulco
,
Daniel Kepple
,
Volkan Isler
,
Daniel D Lee
Cite
Paper
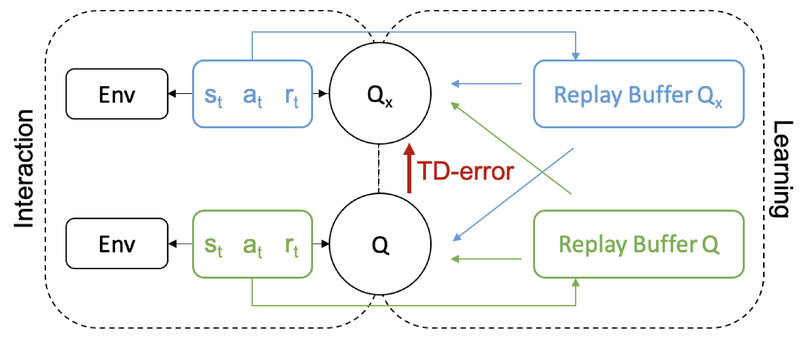
Reward Prediction Error as an Exploration Objective in Deep RL
Riley Simmons-Edler
,
Ben Eisner
,
Daniel Yang
,
Anthony Bisulco
,
Eric Mitchell
,
Sebastian Seung
,
Daniel Lee
Cite
Paper
»
Cite
×