Home
Publications
Talks
Blog
Resume
Photos
Light
Dark
Automatic
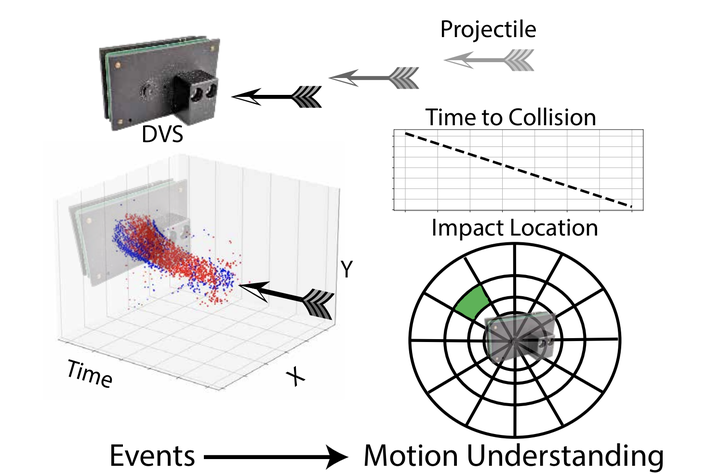
Fast Motion Understanding with Spatiotemporal Neural Networks and Dynamic Vision Sensors
Anthony Bisulco
,
Fernando Cladera Ojeda
,
Volkan Isler
,
Daniel D Lee
January 2020
Cite
Paper
Type
Conference paper
Publication
2021 IEEE International Conference on Robotics and Automation
Cite
×