Home
Publications
Talks
Blog
Resume
Photos
Light
Dark
Automatic
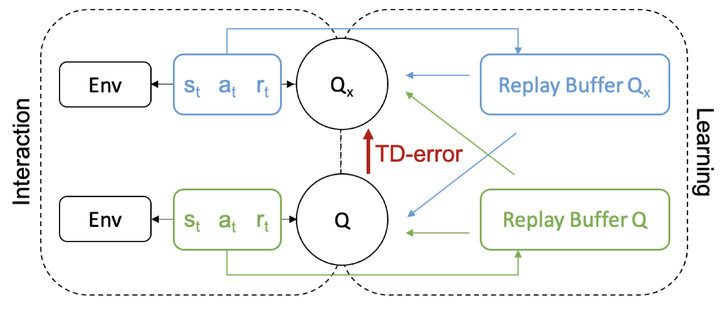
Reward Prediction Error as an Exploration Objective in Deep RL
Riley Simmons-Edler
,
Ben Eisner
,
Daniel Yang
,
Anthony Bisulco
,
Eric Mitchell
,
Sebastian Seung
,
Daniel Lee
January 2019
Cite
Paper
Type
Conference paper
Publication
2020 International Joint Conference on Artificial Intelligence
Cite
×